Soluciones de movilidad personalizadas para AGV y sistemas autónomos
Seleccionar los componentes adecuados para plataformas autónomas es una decisión de ingeniería crítica. En Ubetter, somos especialistas en soluciones de movilidad personalizadas diseñadas específicamente para las rigurosas exigencias de los sistemas AGV y AMR. Dirigidos por un veterano del sector con 15 años de experiencia en ingeniería alemana de primer nivel, salvamos las distancias entre los productos de catálogo estándar y los precisos requisitos cinemáticos de la robótica moderna.
Por qué es importante personalizar la movilidad de los robots
Los componentes de movilidad estándar no suelen estar a la altura de los rigores técnicos que exige el vuelo autónomo. Nuestro sitio soluciones de movilidad personalizadas capacitar a los ingenieros para:
Optimizar el rendimiento de rodadura: Adapte los perfiles de las bandas de rodadura a tipos de suelo específicos para reducir la resistencia.
Mejora el radio de giro: Desplazamientos giratorios de ajuste fino para una maniobrabilidad superior en espacios reducidos.
Mejorar la estabilidad operativa: Garantiza un contacto constante con el suelo incluso durante una aceleración rápida.
Convierta la movilidad en un activo: Vaya más allá de las limitaciones del catálogo para alcanzar los objetivos exactos de rendimiento del chasis.
Ingeniería de interfaz Chassis-First
Adoptamos una mentalidad de “chasis primero”, garantizando que el sistema de movilidad se integre a la perfección en la anatomía única de su robot. Apoyamos a nuestros socios a través de:
Configuraciones de montaje flexibles: Diseños de placa superior personalizados para adaptarse a los patrones de tornillos existentes.
Integración compacta: Carcasa de perfil bajo para robots con espacio vertical restringido.
Reducción del ciclo de rediseño: Apoyo CAD en las primeras fases para evitar interferencias mecánicas.
Compatibilidad sin fisuras: Garantizar un ajuste perfecto entre los módulos de transmisión, las ruedas y el bastidor.
Resistencia a la rodadura y eficiencia de la batería
La resistencia a la rodadura es un asesino silencioso de la resistencia operativa. Ubetter ayuda a prolongar la duración de las misiones y a reducir el coste total de propiedad:
Optimización avanzada de materiales: Selección de compuestos de poliuretano de alto rebote para minimizar la pérdida de energía.
Selección de rodamientos de precisión: Utiliza rodamientos de baja fricción y alta calidad para una rotación más suave.
Reducción de la carga del motor: Disminución de la fuerza de “arranque” necesaria para iniciar el movimiento.
Gestión térmica: Reducción de la generación de calor en el interior de la rueda durante ciclos de trabajo continuos y prolongados.
Diseño de la suspensión y protección del sensor
Las vibraciones de los suelos industriales irregulares pueden degradar los sensibles sensores LiDAR y de navegación. Ubetter desarrolla estructuras de suspensión personalizadas que:
Mejorar la adaptabilidad al terreno: Garantiza un contacto constante entre la rueda y el suelo en superficies irregulares.
Proteja la electrónica de a bordo: Amortiguan los choques de alta frecuencia que provocan fallos en el hardware.
Mantener la precisión del movimiento: Elimina el “ruido del sensor” causado por la excesiva vibración del chasis.
Prolongue la vida útil de los componentes: Reducir la tensión mecánica ejercida sobre el bastidor interno del robot.
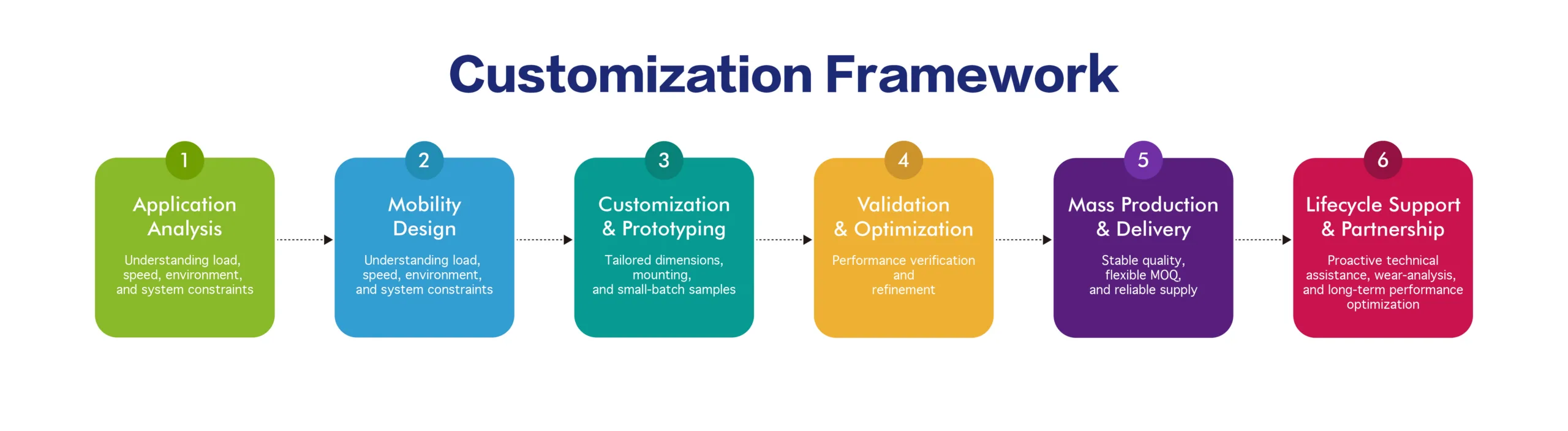
El marco de personalización en 6 fases de Ubetter
Un enfoque sistemático garantiza que cada solución de movilidad que ofrecemos esté optimizada para la fiabilidad a largo plazo de su sistema autónomo. Así es como pasamos del concepto inicial a la colaboración a gran escala:
1. Análisis de aplicaciones: No nos limitamos a pedir requisitos de carga. Analizamos el ciclo de trabajo de su robot, la fricción de la superficie del suelo y las limitaciones térmicas para identificar los retos cinemáticos específicos de su entorno.
2. Diseño de la movilidad: Nuestro equipo de ingenieros selecciona geometrías de rueda y compuestos avanzados de poliuretano que equilibran la resistencia a la rodadura con la necesidad de navegación y posicionamiento de alta precisión.
3. Personalización y creación de prototipos: Proporcionamos prototipos rápidos y muestras de lotes pequeños -incluidas interfaces de montaje personalizadas y dimensiones especializadas- para garantizar una integración mecánica perfecta antes de la implantación a gran escala.
4. Validación y optimización: Cada prototipo se somete a una rigurosa verificación de rendimiento. Analizamos la fuerza de arranque y la eficacia de la amortiguación para perfeccionar la solución y conseguir la máxima resistencia del sistema.
5. Producción y entrega en serie: Gracias a nuestras asociaciones integradas de fabricación, ofrecemos un control de calidad estable y cantidades mínimas de pedido (MOQ) flexibles para satisfacer sus necesidades de escalado, desde la fase piloto hasta el mercado de masas.
6. Apoyo al ciclo de vida y asociación: Nuestro compromiso no termina con la entrega. Ofrecemos asistencia técnica proactiva y análisis de desgaste para ayudarle a optimizar el rendimiento a largo plazo y los ciclos de mantenimiento de su flota de robots.
Preguntas más frecuentes: Ingeniería de movilidad robótica
P: ¿Cómo selecciono las ruedas adecuadas para una carga útil de AGV de más de 500 kg?
A: La selección depende de algo más que la carga; requiere analizar el par de arranque y la dureza de la banda de rodadura para garantizar que los motores no se sobreesfuerzan mientras mantienen un agarre preciso para la navegación.
P: ¿Cuál es la mejor forma de proteger los sensibles sensores LiDAR de las vibraciones del suelo?
A: Recomendamos integrar ruedas con suspensión amortiguada. Al ajustar el índice de elasticidad a su carga útil específica, puede amortiguar las vibraciones de alta frecuencia que causan el “ruido del sensor”.”
P: ¿Puede Ubetter proporcionar archivos CAD para la integración del chasis?
A: Sí. Proporcionamos soporte CAD 2D/3D detallado durante las primeras fases de diseño para garantizar que nuestros soluciones de movilidad personalizadas encajan perfectamente en el armazón de su robot.