Kundanpassade mobilitetslösningar för AGV och autonoma system
Att välja rätt komponenter för autonoma plattformar är ett kritiskt ingenjörsbeslut. På Ubetter specialiserar vi oss på kundanpassade mobilitetslösningar som är särskilt utformade för de rigorösa kraven i AGV- och AMR-system. Under ledning av en 15-årig branschveteran med bakgrund inom tysk ingenjörskonst överbryggar vi klyftan mellan standardkatalogprodukter och de exakta kinematiska kraven inom modern robotteknik.
Varför anpassning av robotmobilitet är viktigt
Standardkomponenter för mobilitet uppfyller ofta inte de tekniska krav som ställs för autonoma flygningar. Vår skräddarsydda mobilitetslösningar ge ingenjörer möjlighet att:
Optimera rullningens prestanda: Skräddarsy slitbaneprofiler för specifika golvtyper för att minska luftmotståndet.
Förbättra svängradien: Finjustera svivelförskjutningarna för överlägsen manövrerbarhet i trånga utrymmen.
Förbättra den operativa stabiliteten: Säkerställer jämn markkontakt även under snabb acceleration.
Gör mobilitet till en tillgång: Gå bortom katalogbegränsningar för att uppfylla exakta mål för chassiprestanda.
Gränssnittsteknik för chassi-först
Vi tänker “chassi först” och ser till att mobilitetssystemet integreras sömlöst i robotens unika anatomi. Vi stödjer våra partners genom att:
Flexibla monteringskonfigurationer: Anpassade topplattor för att matcha befintliga bultmönster.
Kompakt integration: Lågprofilerat hölje för robotar med begränsat vertikalt utrymme.
Redesign Cycle Reduction: CAD-stöd i tidigt skede för att förhindra mekanisk störning.
Sömlös kompatibilitet: Säkerställer perfekt passform mellan drivmoduler, hjul och ram.
Rullmotstånd och batterieffektivitet
Rullmotstånd är en tyst mördare av operativ uthållighet. Ubetter hjälper till att förlänga uppdragens varaktighet och sänka den totala ägandekostnaden genom att:
Avancerad materialoptimering: Välja polyuretanföreningar med hög återfjädring för att minimera energiförlusten.
Val av precisionslager: Högkvalitativa lager med låg friktion för jämnare rotation.
Minskad belastning på motorn: Sänker den “utbrytningsstyrka” som krävs för att inleda en rörelse.
Termisk hantering: Minskar värmeutvecklingen i hjulet under kontinuerliga, långa arbetscykler.
Design av upphängning och sensorskydd
Vibrationer från ojämna industrigolv kan försämra känsliga LiDAR- och navigationssensorer. Ubetter utvecklar skräddarsydda upphängningsstrukturer som:
Förbättra anpassningsförmågan till terrängen: Säkerställer konstant kontakt mellan hjul och golv på ojämna ytor.
Skydda elektroniken ombord: Dämpa högfrekventa stötar som orsakar maskinvarufel.
Behåll rörelsens precision: Eliminerar “sensorbrus” som orsakas av överdriven chassivibration.
Förläng komponenternas livslängd: Minska den mekaniska påfrestningen på robotens inre ram.
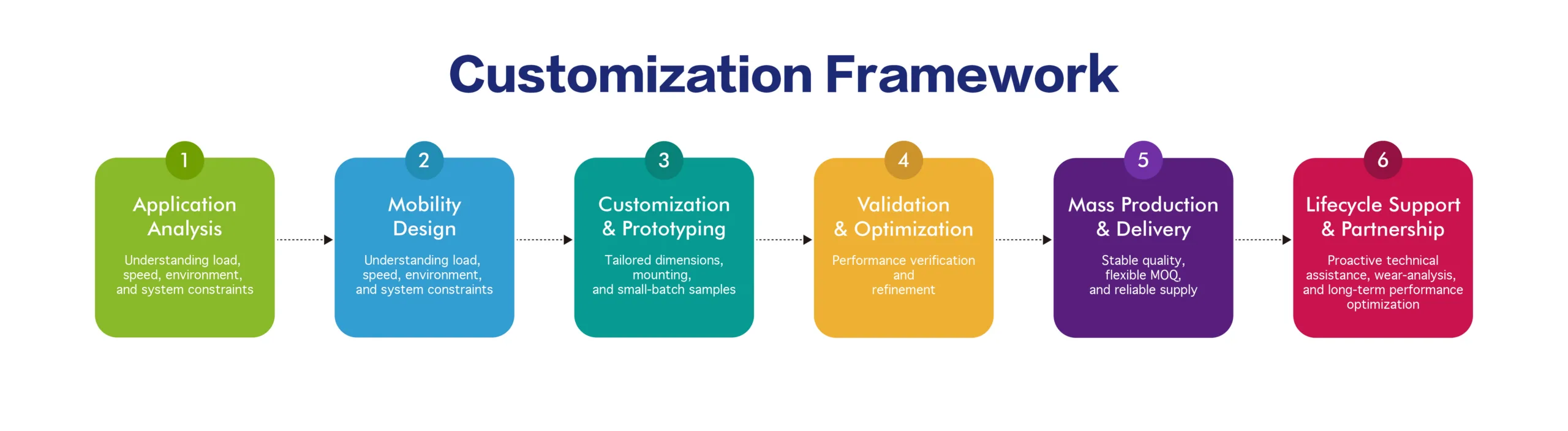
Ubetters anpassningsramverk i 6 steg
Ett systematiskt tillvägagångssätt säkerställer att varje mobilitetslösning vi levererar är optimerad för långsiktig tillförlitlighet i ditt autonoma system. Så här går vi från ett första koncept till ett partnerskap för stora volymer:
1. Applikationsanalys: Vi frågar inte bara efter belastningskrav. Vi analyserar din robots arbetscykel, golvets ytfriktion och termiska begränsningar för att identifiera de specifika kinematiska utmaningarna i din miljö.
2. Mobilitetsdesign: Vårt ingenjörsteam väljer hjulgeometrier och avancerade polyuretanblandningar som balanserar rullmotståndet med behovet av navigering och positionering med hög precision.
3. Anpassning och prototyptillverkning: Vi erbjuder snabb prototyptillverkning och prover i små serier - inklusive anpassade monteringsgränssnitt och specialmått - för att säkerställa perfekt mekanisk integration före fullskalig driftsättning.
4. Validering och optimering: Varje prototyp genomgår en rigorös verifiering av prestanda. Vi analyserar “break-out”-kraft och dämpningseffektivitet för att förfina lösningen för maximal systemuthållighet.
5. Massproduktion och leverans: Genom att utnyttja våra integrerade tillverkningspartnerskap erbjuder vi stabil kvalitetskontroll och flexibla MOQ (Minimum Order Quantities) för att stödja dina skalningsbehov från pilot till massmarknad.
6. Stöd och partnerskap för livscykeln: Vårt åtagande slutar inte vid leverans. Vi tillhandahåller proaktiv teknisk assistans och slitageanalys för att hjälpa dig att optimera den långsiktiga prestandan och underhållscyklerna för din robotflotta.
Ofta ställda frågor: Teknik för robotars rörlighet
Q: Hur väljer jag rätt hjul för en AGV-nyttolast på 500 kg+?
A: Valet beror på mer än bara belastningen; det kräver analys av startmoment och slitbanans shore-hårdhet för att säkerställa att motorerna inte överbelastas samtidigt som de bibehåller ett exakt navigeringsgrepp.
F: Hur skyddar man på bästa sätt känsliga LiDAR-sensorer från golvvibrationer?
A: Vi rekommenderar integrerad stötdämpande hjul med hjulupphängning. Genom att anpassa fjäderbelastningen till din specifika nyttolast kan du dämpa högfrekventa vibrationer som orsakar “sensorbrus”.”
F: Kan Ubetter tillhandahålla CAD-filer för chassiintegration?
A: Ja, det gör vi. Vi tillhandahåller detaljerad 2D/3D CAD-support under de tidiga designfaserna för att säkerställa att våra skräddarsydda mobilitetslösningar passar perfekt i din robots ram.